Resulta altamente satisfactorio ver a este pequeñajo robótico moverse por el recorrido de la pista a toda velocidad, sobre todo sabiendo que no hay raíles ni nada parecido, tan solo las líneas pintadas en el suelo y un sensor óptico para realizar el seguimiento. Parece tener una velocidad de unos 2-3-4 m/s, que varía según haya más o menos curvas o esquinas que doblar.
En este video usaremos el carro robot multiproposito visto en este video, el cual se los recomiendo para comprender el codigo......en este video explico como hacer el seguidor de linea, explico el codigo. https://youtu.be/5Uk0WVjvUvE codigo y apk para descargar(codigo del primer video) http://adf.ly/1k6x2l CLAVE: www.editronikx.com (CLIC EN EL LINK ESPERE 5 SEGUNDOS Y CONTINUA CON LA DESCARGA DESDE DRIVE)
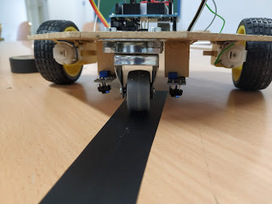
En este video ensayaremos el robot seguidor de línea sobre una pista de línea negra delgada, explicaré como realizar los ajustes finales al chasis del robot con el fin de ajustar la distancia entre los sensores reflectivos y la pista.
En este video explico la conexión eléctrica de todo el proyecto del robot seguidor de línea, y doy una explicación inicial de lo que es el lenguaje de programación basic en microcontroladores Picaxe, veremos el comando LET DIRS, y lo usaremos para colocar los puertos del microcontrolador como puertos de entrada para emplear la característica de puertos de "alta impedancia" de nuestro Picaxe, por último programaremos el robot con el código de verificación inicial para comprobar el correcto funcionamiento de los motores.
En este video se explica el ensamble final del proyecto robot seguidor de línea, se muestra como es la adaptación de cada uno de los componentes y tarjetas sobre la plataforma base del robot, y se explica la conexión de los cables en sus respectivos puertos.
El robot Edison puede leer códigos de barra, que esconden pequeños programas que ejecuta el robot, o puede programarse a través de la aplicación EdWare: software diseñado expresamente para el robot y que puede descargarse de la página oficial de Edison para diferentes sistemas operativos y dispositivos.
A la hora de probarlo y como primera toma de contacto con esta herramienta se ha utilizado uno de los ejemplos que muestra su plataforma, el típico seguidor de línea negra (de 1,5cm) sobre un fondo blanco.
En este primer video, explico de manera teorica el diseño y analisis del Robot Seguidor de Linea, haciendo mencion a las caracteristicas del Sensor CNY70 asi como al circuito del Control Electronico que gobierna al Robot. Este es el primer video de una serie de 3 videos, los otros 2 videos siguientes son netamente pracitcos en donde explico la Construccion paso a paso del Robot.
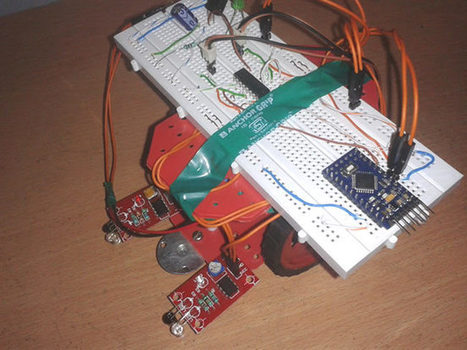
He aquí un diseño simple para construir un robot seguidor de líneas básico con 2 sensores CNY70 y componentes discretos de fácil compra en cualquier comercio de electrónica.
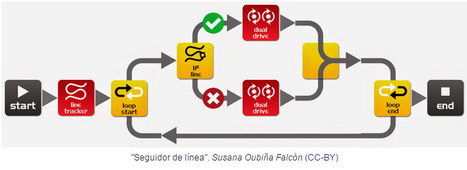
El objetivo de nuestro proyecto será crear un robot móvil que siga el recorrido marcado por una línea negra. El robot detectará con sensores de infrarrojos la presencia de la línea negra para poder rectificar su trayectoria y seguir el recorrido marcado por la misma.
Line follower Robot is a machine which follows a line, either a black line or white line. Basically there are two types of line follower robots: one is black line follower which follows black line and second is white line follower which follows white line. Line follower actually senses the line and run over it.
Hola, hoy vamos a comenzar a hacer el robot seguidor de líneas, ya les comenté en entrega anterior como hacer el modulo de tracción usando partes de unas lectoras de disco, la idea es hacer dos o tres tipos de de robot usando siempre ese módulo, he conseguido un par de compacteras que tienen unos muy interesantes reductores con varios engranajes lo que hacen que el robot no vaya tan ligero.
En este video tutorial desarrollo el código de programación del robot seguidor de línea; explicando la lógica del sistema cuando la pista por donde andará el robot es una línea negra "delgada"; desarrollaré el código completo en el software Picaxe Editor
En este video enseño como descargar el software Picaxe Editor 6 , el cual es la nueva versión del programa que usaremos para programar nuestro robot, adicional mente enseño como instalar el cable adaptador usb-serial versión TrendNet y sus drivers, y explico breve mente la interfaz gráfica del programa Picaxe Editor 6
En este nuevo video-tutorial mostraré los materiales que vamos a necesitar para el desarrollo final del robot seguidor de línea; usaremos la tarjeta programadora picaxe08m que usamos en el proyecto anterior y adicional mente usaremos dos tarjetas nuevas, llamadas módulo Robot 2.0 - 1 y módulo Robot 2.0 - 2 ; la primera es la tarjeta que controla el giro del motor y la segunda tarjeta incluye los sensores reflectivos.
Tutorial; Como construir un Robot Seguidor de Linea Negra LINE FOLLOWER ROBOT Materiales: (2) sensores CNY70 (2) resistencias de 500 ohmios (2) resistencias de 20K ohmios (6) resistencias de 1K ohmios (4) transistores 2222A (2) LED rojos (2) Motoreductores de minimo 1Kg de fuerza y 100PRM (2) llantas (1) Bateria 9 Voltios ( ) Cables para conectar (1) Protoboard
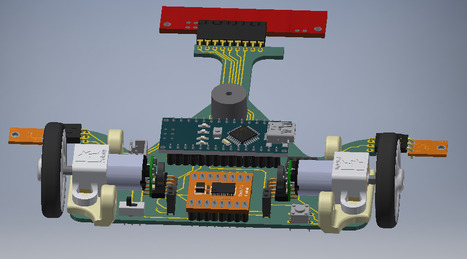
Vehículo Controlado Mediante un Computador se podría controlar un “vehículo” (Robot pequeño de ruedas) que avance, retroceda o gire mediante instrucciones que se impartan desde el equipo, o se podría hacer que este vehículo en vez de seguir instrucciones desde el PC, siga una ruta determinada mediante infrarrojos. Este será constituido por ruedas, motores, fuente de energía, y tarjeta de control (micro controlador Arduino ATmega168) programado en lenguaje Arduino.
To get content containing either thought or leadership enter:
To get content containing both thought and leadership enter:
To get content containing the expression thought leadership enter:
You can enter several keywords and you can refine them whenever you want. Our suggestion engine uses more signals but entering a few keywords here will rapidly give you great content to curate.



 Your new post is loading...
Your new post is loading...