Primer video que dedicamos a los controladores PId y donde mostramos en que consisten y cuales son sus posibles utilizaciones. Continuaremos en otros videos implementadolos en un arduino, pero es buena cosa, el conocer su funcionamiento para luego saber trabajar con el de forma fiable.
Ahora toca pasar a un ejemplo práctico de PID. Uno de los más apropiados para empezar es un control de iluminación, porque el montaje es muy sencillo y además podemos visualizar fácilmente el resultado.
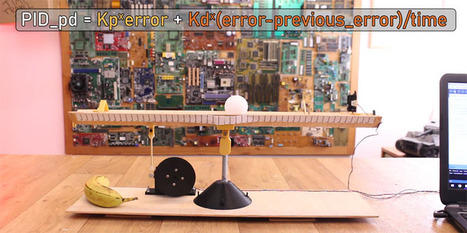
Basado en Control PID de Ángel Espeso, un sistema de control proporcional, integral y derivativo establece un ángulo de inclinación en la barra que permite equilibrar la bola.
Proportional-Integral-Derivative (PID) control is the most common control algorithm used in industry and has been universally accepted in industrial control. The popularity of PID controllers can be attributed partly to their robust performance in a wide range of operating conditions and partly to their functional simplicity, which allows engineers to operate them in a simple, straightforward manner. As the name suggests, PID algorithm consists of three basic coefficients; proportional, integral and derivative which are varied to get optimal response. Closed loop systems, the theory of classical PID and the effects of tuning a closed loop control system are discussed in this paper. The PID toolset in LabVIEW and the ease of use of these VIs is also discussed.
El control con realimentación PID es extremadamente útil y se usa en infinitas aplicaciones. En su esencia, calcula la desviación o error entre un valor medido y un valor deseado. Con esto se puede controlar de forma eficaz drones, robots sigue líneas o la temperatura de la cama caliente de tu impresora 3D por ejemplo. Se trata de un algoritmo con tres factores principales: Proporcional, Integral y Derivada. Que no cunda el pánico al leer sobre derivadas e integrales, ya que si entiendes bien cómo funciona el algoritmo PID, no te será complicado implementarlo en tu siguiente proyecto.
Que es el Control PID, para que sirve? como funciona el PID? te lo voy a explicar de forma fácil (Presente, pasado y futuro) ejemplo con robot balancín. Canal Pasos por Ingeniería: https://www.youtube.com/channel/UCbho...
La semana pasada hablaba del PID. Pero claro tanto hablar del PID no caí en que un PID se puede implementar también en un ordenador o incluso en un Arduino. Su estado natural es en una serie de cajas que se programan con los valores adecuados de P, I y D. Estas cajas ya se encargan de controlar el proceso.
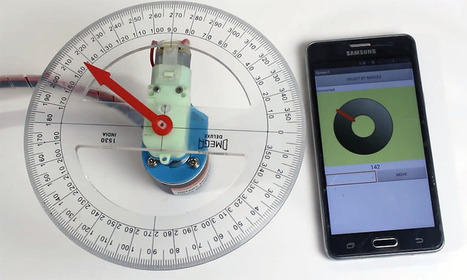
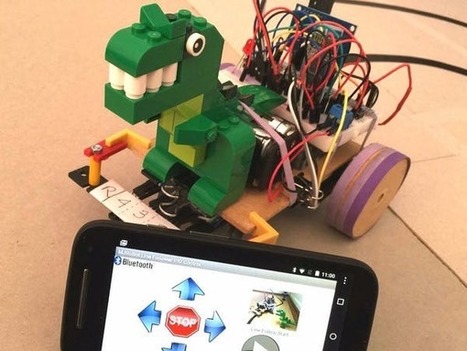
Controlar un motor DC de forma precisa no es una tarea fácil, pero gracias al algoritmo PID junto con un encoder, se puede conseguir una precisión muy buena. En el vídeo que os dejo a continuación se explica cómo hacer un sencillo proyecto usando PID con Arduino moviendo un pequeño motor.
Es fácil entender el Control PID estudiando un sistema Barra y Bola y utilizando como Controlador un Arduino. El objetivo es situar la bola en el centro de la barra inclinándola de forma conveniente mediante un lazo cerrado de control.
Kit de Control PID de un sistema Barra y Bola con Arduino UNO. Señalización mediante neopixeles. Programación mediante teclado y LCD incluidos. Se suministra desmontado. Vídeo de Montaje No se requiere soldadura electrónica
In this tutorial we will build this balance. It is controlled with a servo motor and an Arduino with a PID code. The idea is to get the ping pong ball in the middle. To do that we will use a IR distance sensor. By knowing the distance to the ball and using the PID code to move the servo, we could control the position and speed of the ball and stop it exactly in the middle. The system could get better with a better resolucion sensor and better servo motor, also better PID constants. So, let'
Como ya sabrán la mayoría de los que leen este blog a diario, el algoritmo PID (o Proporcional Integral Derivativo), es un elemento bastante usado en sistemas autómatas (de una manera u otra), en los cuales este algoritmo cobra bastante importancia en las funciones de re-alimentación, además de provocar que la curva de respuesta sea mucho mas suave que si usamos un sistema alternativo.
La idea es haceros un poco de resumen sobre el panorama de librerías ya diseñadas que nos permitan crear un control PID sencillo (relativamente), sin tener que programarlo desde 0.
Para todo aquél que haya hecho un proyecto sobre robótica, en el que se requiera un mínimo de estabilidad en el proceso, linealidad y el mínimo error posible, sabrá que no es una tarea fácil.
Como ya se ha hablado incontables veces en el blog, un PID es una solución evidente ante este problema, pero presenta un complejo de ajuste e implementación en nuestros códigos, que por suerte se suple con las numerosas librerías ya preparadas para estas tareas en nuestros entornos favoritos (Arduino, MBED, Maple...).
Es fácil entender el Control PID estudiando un sistema Barra y Bola y utilizando como Controlador un Arduino. El objetivo es situar la bola en el centro de la barra inclinándola de forma conveniente mediante un lazo cerrado de control.
Controlador PID (Proporcional, Integral, Diferencial) Un controlador PID es un mecanismo de control por realimentación ampliamente usado en sistemas de control. Este calcula la desviación o error entre un valor medido y un valor deseado, y ejecuta una acción para ajustar el proceso.
Continuamos con la entrada dedicada a dar unas pequeñas nociones de sistemas de control automático en un procesador como Arduino. En esta entrada veremos el controlador PID, uno de los controladores más extendido por su sencillez y por ser capaz de conseguir un buen comportamiento en una gran variedad de situaciones.
Por supuesto, insistimos en que no vamos a entrar en profundidad en los detalles del PID, dado que es tema muy extenso (e interesante). Si tenéis interés podéis consultar la abundante documentación disponible.
Estaba mirando los drones famosos y me he dado cuenta que la estabilidad del vuelo de dichos aparatejos está controlada por aquello que llamamos PIDs. Los PIDs son muy comunes en la industria y las profesiones relacionadas con la automatización de la industria es algo a lo que están acostumbradas. Pero por ejemplo, en el sector de las telecomunicaciones puede sonar a una cosa rara…
To get content containing either thought or leadership enter:
To get content containing both thought and leadership enter:
To get content containing the expression thought leadership enter:
You can enter several keywords and you can refine them whenever you want. Our suggestion engine uses more signals but entering a few keywords here will rapidly give you great content to curate.



 Your new post is loading...
Your new post is loading...