


 Your new post is loading...
Your new post is loading...

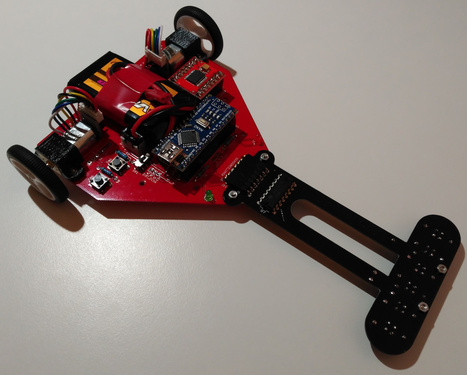

- En este taller construiremos el Cyclops, un robot siguelíneas velocista open source, diseñado para introducir a nuevos constructores en la robótica de competición. Se compone de dos placas de circuito impreso: la del chasis autosoportado con la electrónica principal; y la de sensores, que es intercambiable para poder adaptarlo a diferentes pruebas de seguimiento de línea, como rastreadores. Además, ha sido desarrollado para poder incluir sensores de distancia para competir en las pruebas de carreras autónomas, y una cámara experimental para seguimiento de línea a distancia. Aparte del kit básico de Cyclops, en este taller se incluirá el extra de bluetooth (módulo HC-05 para controlar y calibrar el robot mientras corre sobre la pista).
- Materiales: Es imprescindible para este taller que los asistentes adquieran los componentes para el robot que se montará durante el mismo. La lista de materiales está en este repositorio, recomendamos encarecidamente ponerse en contacto con el desarrollador del proyecto (ruben.espino.89@gmail.com), que organizará una compra conjunta de los kits completos en este hilo. Por cada inscripción y robot, es posible traer un/a acompañante . En caso de no disponer de las piezas necesarias, no se podrá seguir el taller.





