

Vamos avanzando y nuestro robot ya casi está montado , ahora calibraremos los motores de forma que cada articulación del robot(base, hombro, codo y pinza) pueda realizar sin problemas el recorrido de 180º.
Get Started for FREE
Sign up with Facebook Sign up with X
I don't have a Facebook or a X account



 Your new post is loading...
Your new post is loading... Your new post is loading...
Your new post is loading...
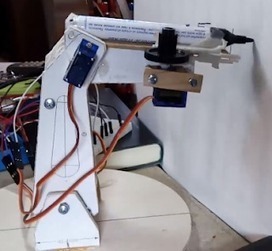
Vamos avanzando y nuestro robot ya casi está montado , ahora calibraremos los motores de forma que cada articulación del robot(base, hombro, codo y pinza) pueda realizar sin problemas el recorrido de 180º. 
No comment yet.
Sign up to comment
|




