Your new post is loading...
Your new post is loading...



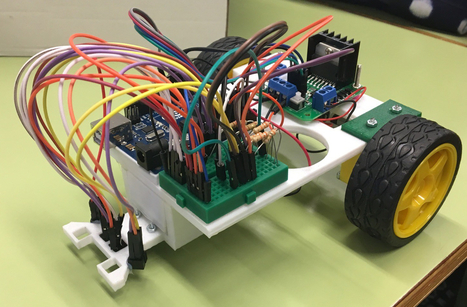
En este tutorial explicaremos el procedimiento para crear un robot móvil con Arduino usando nuestros conocimientos previos adquiridos tras la lectura de los correspondientes artículos publicados en este blog, sobre el sensor de infrarrojos TCRT5000 (ver artículo) y sobre los motores de corriente continua (ver artículo) para crear un interesante robot móvil en el que usaremos los 2 componentes de manera conjunta.
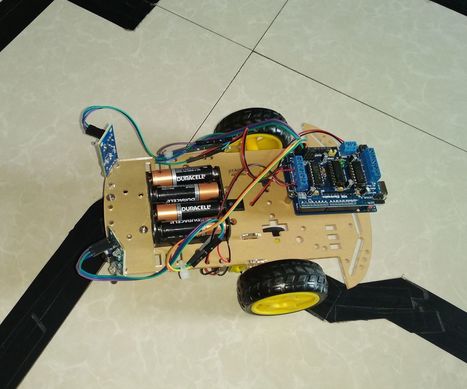
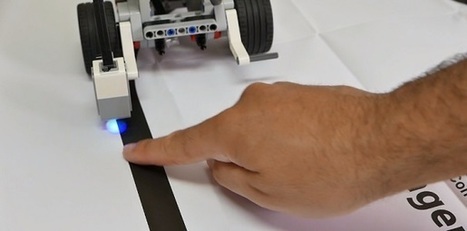
El objetivo de nuestro proyecto será crear un robot móvil que siga el recorrido marcado por una línea negra. El robot detectará con sensores de infrarrojos la presencia de la línea negra para poder rectificar su trayectoria y seguir el recorrido marcado por la misma.