Your new post is loading...
Your new post is loading...



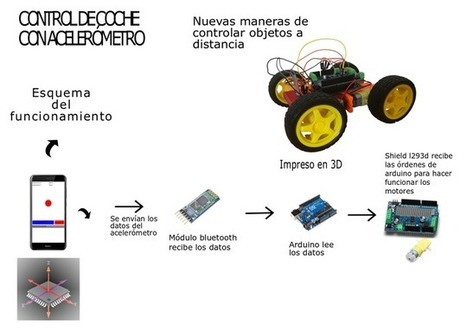
En este proyecto vamos a utilizar la IMU (Unidad de Medición Inercial) presente en la placa Arduino Nano 33 BLE Sense para controlar un robot. La idea es que en función de la inclinación que le demos a la placa generemos los movimientos correspondientes para controlar el robot.