


 Your new post is loading...
Your new post is loading...

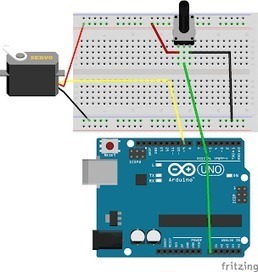

Controlar la posición del eje de un servomotor con un potenciómetro
En ocasiones, los valores que obtenemos de una lectura de un pin analógico, como un sensor, pueden estar fuera de una escala determinada, y tenemos que convertirlos a otro rango para poder usarlos.
El valor de salida que podemos darle al servomotor es de 0 a 180, que se traduce en la posición del eje, pero los datos que leemos del sensor pueden llegar a 1024. Por esto debemos mapear el resultado, es decir , dejarlo en unos valores de entre 0 y 180.
La función “map” del programa asigna un valor máximo y un valor mínimo a un rango dado.
El valor máximo suele estar en 1024, pero el mínimo en nuestro caso será 0.





