


 Your new post is loading...
Your new post is loading...

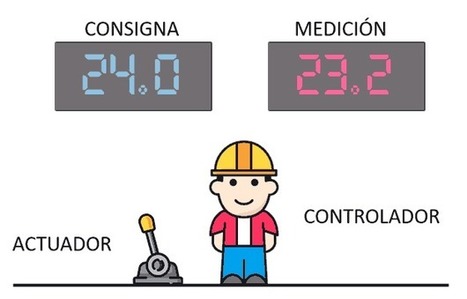

Empezamos una serie destinadas a ver cómo realizar mecanismos de control automáticos en un procesador como Arduino. En esta entrada veremos qué es controlar un sistema. En las próximas veremos el control todo y nada, hasta terminar en el control PID.
No cabe duda que uno de los procesadores como Arduino es controlar sistemas de forma automática. Pero en primer lugar ¿Qué es un controlador? ¿Qué controlador puedo usar? ¿Cómo se implementa un controlador?
Si buscáis encontraréis un montón de información al respecto, libros y libros de cientos de hojas llenos de ecuaciones. Pero el propósito de estas entradas es explicarlo de forma sencilla (o intentarlo), sin usar ni una fórmula (casi ninguna) y sin excesivos formalismos matemáticos.
Por supuesto que no pretende ser un texto riguroso, ya que el campo es enorme (de hecho, eran dos asignaturas enteras y una especialidad en la carrera de ingeniería). Si queréis más detalles podéis apoyaros en la abundante bibliografía disponible.
Aquí intentaremos hacer algo que no es tan frecuente de encontrar, dar una visión intuitiva de la teoría de control y de la motivación que hay detrás, de forma que sea fácilmente entendible, y sin tener que usar transformadas de Laplace, lugares de las raíces, diagramas de Bode, ni teoremas de Niquist.





