


 Your new post is loading...
Your new post is loading...

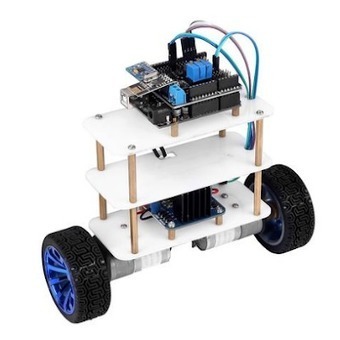

The concept of this project is very simple we use Accelerometer mount over the robot which gives the 3-axis value. accelerometer connected to the Arduino. arduino collect data from the accelerometer and compare the value with the given condition. there are two conditions.
1.if robot tilt in forwarding direction accelerometer gives some value to the Arduino and Arduino give the instruction to the motor to move backwards
2. if robot tilt in backward direction accelerometer gives some another value to the Arduino. arduino, give instruction to move in forwarding direction.





